
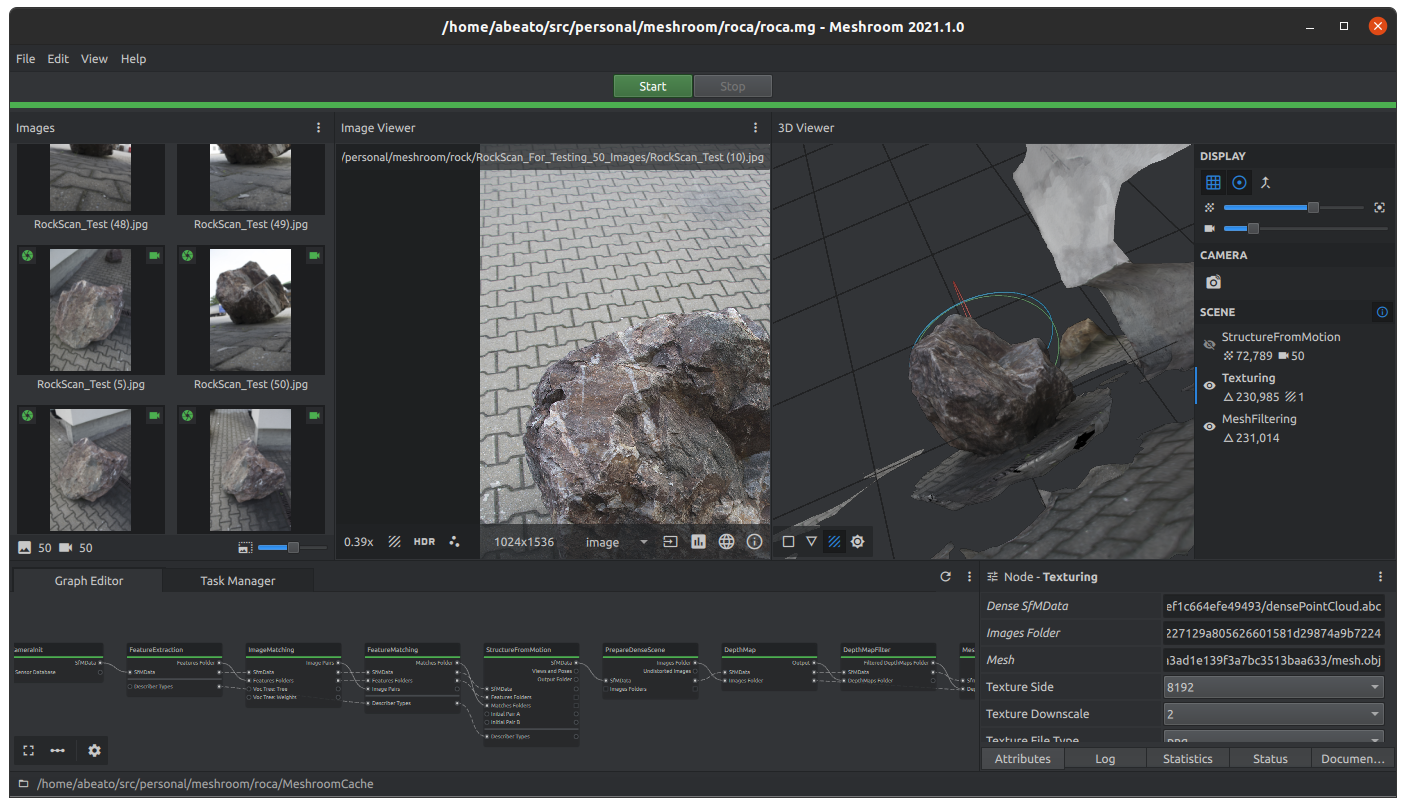
I have some interest in photogrammetry, and, more concretely, in the ways to extract 3D information from a set of photographies of an object. There is excellent open source software that is able to do this, like Meshroom, which is based on the Alice Vision framework. Once you create a 3D object with this tool, you have a set of vertices and textures that can be manipulated with specialized 3D editing software. And here again we have excellent open source software for this task, like MeshLab.
MeshLab can be extended via plugins, of which there is an extensive list. Some of them are integrated in the main MeshLab repository, but some others can be found in the MeshLab extra plugins repo. As I wanted to research what sort of measurements I could take on my 3D reconstructions, it looked like writing a MeshLab plugin was a great way to do this and be able to visualize and interact with the results easily.
I had some fun last year with finding optimal rectangles for videoconferences, so somewhat following that line of thought, I wondered how easy was to put an irregular object into an oriented bounding box (OBB) with minimal size, that is, the rectangular parallelepiped of minimal volume that encloses the object. This is called the optimal OBB in the literature. That seemed like a nice fit to try MeshLab plugins and learn how to do measurements on 3D reconstructions at the same time. Also, optimal OBBs have very important applications, such as fast rendering of 3D scenes, collision detection, and others. And optimal packaging might be an application as well indeed.
I put my hands on the task and started to dig into the literature on the topic. There is an exact algorithm to find optimal OBBs found by O’Rourke1, but it is known to be slow (complexity is \(O(N^3)\) being \(N\) the number of vertices) and difficult to implement, so I looked at approximate algorithms. The one from Chang et al2 looked fast and results were very near to O’Rourke’s solution. Also importantly, the authors published Matlab sources for it, so I chose that one for implementation in MeshLab. They called this algorithm HYBBRID because it mixes genetic algorithms with the Nelder-Mead optimization method, that can be used when derivatives for the target function cannot be calculated.
An OBB is defined by a rotation matrix \(R\), the center of the box, and the size of each dimension. The most important part to obtain an optimal OBB is finding the rotation matrix, as once we have it it is trivial to calculate the other parameters by rotating the vertices with \(R^T\) and then finding the minimum and maximum coordinates in the x, y, and z axis. Without digging too much into the details (I defer to the paper for that), the HYBBRID algorithm applies a genetic algorithm to sets of rotation matrices. With the ones that produce the smaller volumes, it applies the Nelder-Mead algorithm to find a local optimum. Finally, it applies a further refinement to the best solution by applying the 2D rotating calipers algorithm3 to each rotated axis. The genetic algorithm does a global sampling of the space of rotation matrices, while Nelder-Mead and 2D rotating calipers try to find a local minimum. The minimization function is not convex and not differentiable, although continuous, so this combination of algorithms works really well.
My C++ implementation for MeshLab has already been merged to the extra plugins repository, and can be found here (this was the original PR). I used the Matlab code as reference, with some improvements in the 2D calipers algorithm and in the calculation of average rotations. The filter adds two meshes to the object to which it is applied, one with the convex hull of the object and another one that defines the bounding box. The convex hull is not strictly necessary, but it reduces the number of vertices you need to care about, speeding up the algorithm. In my tests, the results looked amazingly accurate, and, furthermore, very fast. It took less than 15 seconds for objects of around 100K vertices on my 4 years old laptop (i7 with 8 cores), and the number of iterations of HYBBRID was usually around 6-10.
To build the plugin in the “build” directory, run these commands:
$ git clone --recurse-submodules https://github.com/cnr-isti-vclab/meshlab-extra-plugins.git
$ cd meshlab-extra-plugins
$ cmake -S . -B build
$ cmake --build buildThe recursive clone creates a meshlab subfolder. I recommend to compile MeshLab from there (follow these instructions), as otherwise the plugin might crash because the ABI offered by MeshLab is not really meant to be stable.
After compilation, you will get a shared object (build/meshlab/src/distrib/plugins/libfilter_orientedbbox.so) that you need to manually add as a plugin to MeshLab. For that, you need to go to Help -> Plugin Info -> Load Plugins, as instructed in the meshlab extra plugins repository. Once you have done this, the filter should be available in Filters -> Remeshing, Simplification and Reconstruction -> Oriented Bounding Box.
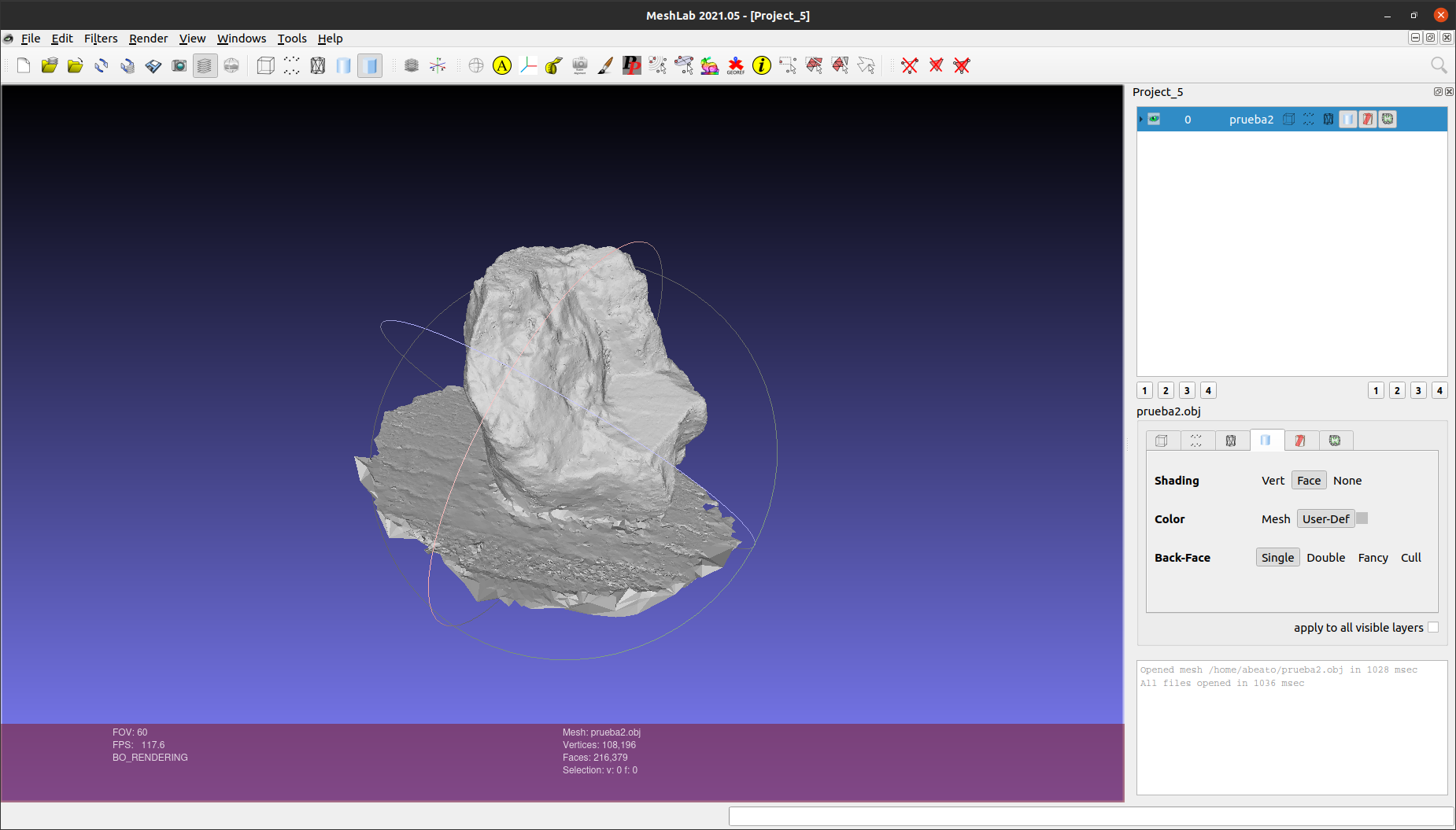
For testing I used this set of images (which are under Creative Commons). I used Meshroom to get a 3D model for them, and then I edited it in MeshLab. To visualize well the results, I used the xray shader (Render -> Shaders -> xray.gdp) that is included in MeshLab and that allows us to “see through” the different object layers. You can also turn on and off different meshes for better visualization. This process is illustrated in the images below.

Below you can see a few more 3D models from this page on which I applied the filter, including of course the mythical tea pot model:






And this is pretty much it. I hope you will enjoy playing with the plugin if you take the time to build it. Or, if you don’t, just playing around with Meshroom and MeshLab is really fun time anyway.